本文最后更新于1039 天前,其中的信息可能已经过时,如有错误请发送邮件到434658198@qq.com
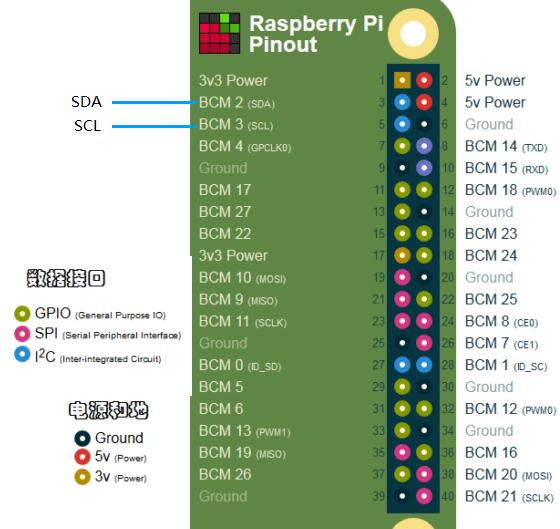
接线图如下:我只接了SDA和SLA ,vcc和gnd自己接
Python代码
#!/usr/bin/python
import smbus
import math
import time
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(16, GPIO.OUT)
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
ii=1;
while True:
print(ii)
ii=ii+1
bus = smbus.SMBus(1) # or bus = smbus.SMBus(1) for Revision 2 boards
address = 0x68 # This is the address value read via the i2cdetect command
# Now wake the 6050 up as it starts in sleep mode
bus.write_byte_data(address, power_mgmt_1, 0)
# print ("-----------------------陀螺仪数据--------------------")
gyro_xout = read_word_2c(0x43)
gyro_yout = read_word_2c(0x45)
gyro_zout = read_word_2c(0x47)
# print ("X轴陀螺仪计数值: ", gyro_xout, " X每秒的旋转度数: ", (gyro_xout / 131))
# print ("Y轴陀螺仪计数值: ", gyro_yout, " Y每秒的旋转度数: ", (gyro_yout / 131))
# print ("Z轴陀螺仪计数值: ", gyro_zout, " Z每秒的旋转度数: ", (gyro_zout / 131))
# print ("------加速度数据--------")
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
# print ("X轴加速度计数值: ", accel_xout, " X每秒的旋转度数: ", accel_xout_scaled)
# print ("Y轴加速度计数值: ", accel_yout, " Y每秒的旋转度数: ", accel_yout_scaled)
# print ("Z轴加速度计数值: ", accel_zout, " Z每秒的旋转度数: ", accel_zout_scaled)
# print ("X轴旋转度数: " , get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
# print ("Y轴旋转度数: " , get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled))
xx=get_x_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
yy=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
print(xx," ",yy)


树莓派